

 服务器0元试用,首购低至0.9元/月起
服务器0元试用,首购低至0.9元/月起
L293D是一种直流电动驱动IC,在一些机器人项目中可用来驱动直流电机或步进电机。
L293D简介
L293D是一种直流电动驱动IC,在一些机器人项目中可用来驱动直流电机或步进电机。它共有16个引脚,可以同时驱动两路直流电机。输入电压范围:4.5 V ~ 36 V;每通道输出电流:MAX 600mA。市面上有许多采用L293D芯片的电机驱动板,当然我们也可以自己通过简单连接来使用它。
L293D引脚图
上图是L293D的引脚定义图,引脚含义如下:
Enable 1,2:1脚,1,2通道使能端,高电平使能;
Input 1~4:2,7,10,15脚,电机控制信号输入脚,可连接至单片机的信号输出脚;
Output 1~4:3,6,11,14脚,电机输出脚;
Enable 3,4:9脚,3,4通道使能端,高电平使能;
Vcc1:+5V电源端;
Vcc2:+4.5~36V电机驱动电源;
GND:地。
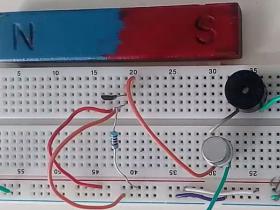
L293D的简单运用
L293D可以通过简单连接,直接驱动两路直流电机,如上图所示:直接用红线将 1,9,8,16引脚连接到 5V 电源;将 4, 5, 12 , 13 引脚连接在一起后接电源地。2,7,10,15脚连接树莓派的GPIO引脚,3,6和11,14引脚分别接一个电机。这种方法可以运用到一些常见的小车底盘上,比如下图的这种底盘的连接方法。
查看小车底盘和L293D的价格信息,这是一种简单的四轮驱动型汽车底盘,左右转向均由程序代码控制,上图的连接方式将四个电机连接到一个L293D。最后将Input1,2,3,4引脚连接树莓派GPIO ,这样就完成了。在四轮小车的设计中,主要的难点是右转和左转,为了解决这个问题,我们将同侧车轮连接到相同的输出通道,这样可以确保同侧车轮转动方向一致。试想一下,当左侧车和右侧车轮分别转向不同方向时,汽车左转右转的问题是不是就解决了。
树莓派3B+ L293D驱动小车代码
/* * Input 1 连接 GPIO2(pin #13). * Input 2 连接 GPIO3(pin #15). * Input 3 连接 GPIO4(pin #16). * Input 4 连接 GPIO5(pin #18). */ import RPi.GPIO as GPIO from time import sleep GPIO.setmode(GPIO.BOARD) GPIO.setup(13, GPIO.OUT) GPIO.setup(15, GPIO.OUT) GPIO.setup(16, GPIO.OUT) GPIO.setup(18, GPIO.OUT) #前进 sleep(5) GPIO.output(13, True) GPIO.output(15, False) GPIO.output(16, False) GPIO.output(18, True) #后退 sleep(5) GPIO.output(13, False) GPIO.output(15, True) GPIO.output(16, True) GPIO.output(18, False) #右转 sleep(5) GPIO.output(13, True) GPIO.output(15, False) GPIO.output(16, True) GPIO.output(18, False) #左转 sleep(5) GPIO.output(13, False) GPIO.output(15, True) GPIO.output(16, False) GPIO.output(18, True) GPIO.cleanup()
文章末尾固定信息






评论